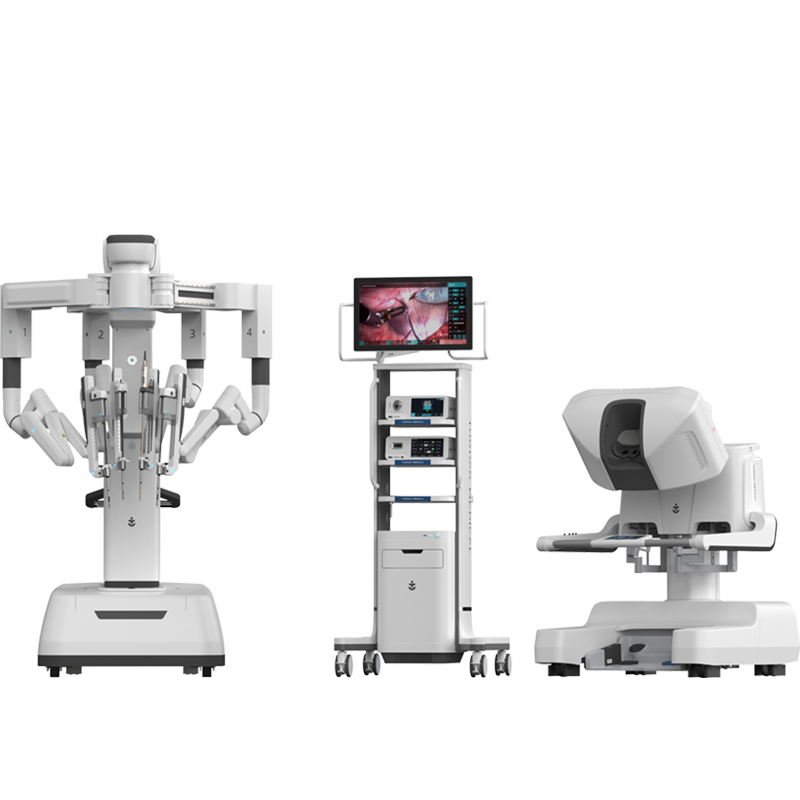








柔性触感皮肤技术
高灵敏度触觉识别与反馈,实现温度、力、粗糙度等多维度感知反馈功能
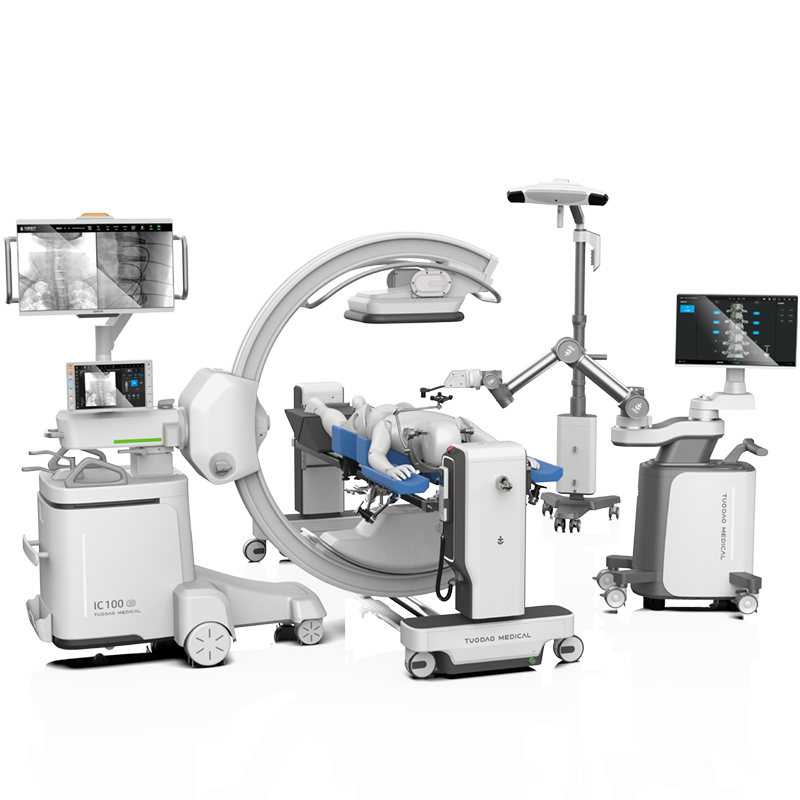
立体视觉感知技术
模仿人类双眼,为机器人提供视觉及景深感知






开放式软硬件架构,高性能机器人学算法,实现更精准的控制
高灵敏度触觉识别与反馈,实现温度、力、粗糙度等多维度感知反馈功能
模仿人类双眼,为机器人提供视觉及景深感知
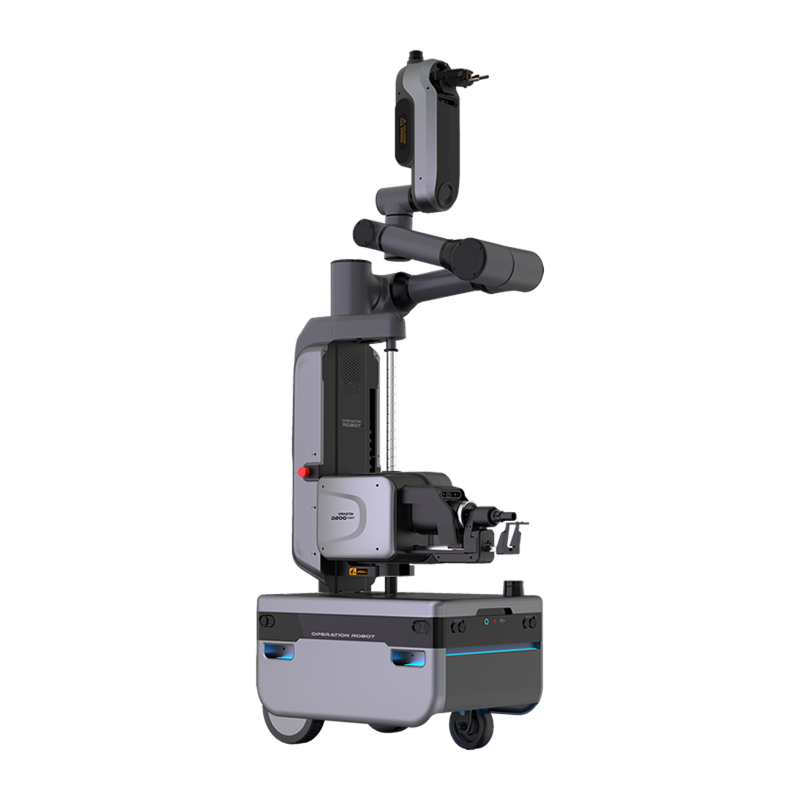
捕捉人体运动信号,实现精确控制
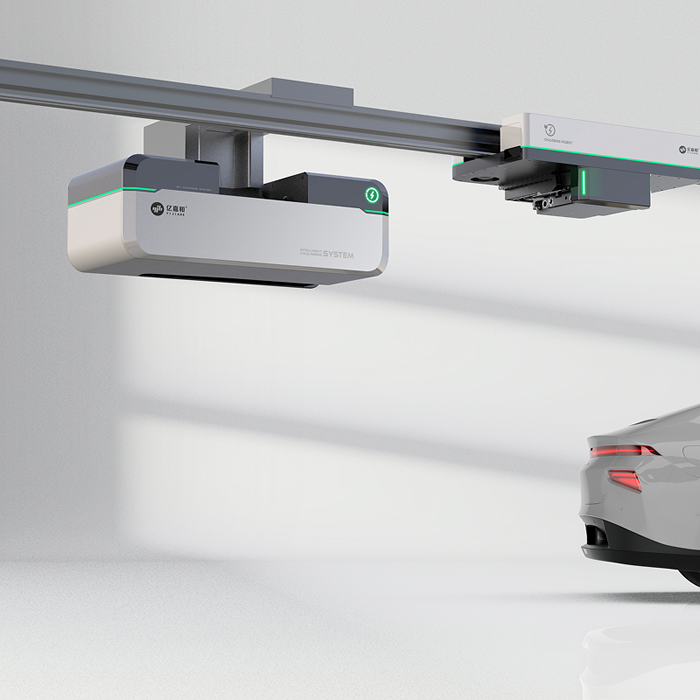
联合东南大学获批国家重点研发计划
精确感知压力信息,实现力交互功能
人体动作捕捉系统,实时重建人体运动和三维场景
